LEGO WeDO 2.0 Line Follower
Line follower made of LEGO WeDO 2.0 is not only possible, but also works very good.
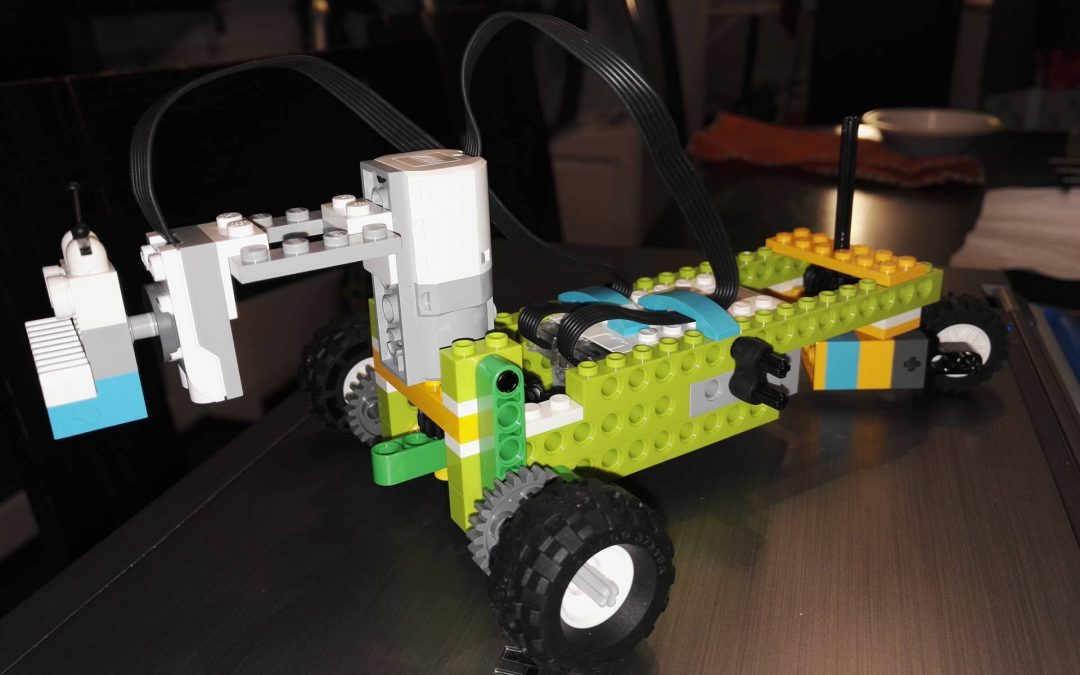
For driving based I used concept created by Master Yoshihito Isogawa, however I had to change it a bit for my purpose: I wanted to drive opposit direction then Master’s Wall Tracker. My experience shows that Line Followeres work best if sensor is located on the short radius arm and close to rotation point that is exactly in a middle between front driving wheels.
I also wanted to add castor wheel – such wheel moves whole construction far smoother.
And my point was to stick only with one set of LEGO WeDO 2.0.
What’s more, program is quite easy 😉
„Line Follower”, czyli robot podążający po wyznaczonej linii, jest nie tylko możliwy do zbudowania z zestawu LEGO WeDO 2.0, ale przede wszystkim, działa bardzo dobrze.
Jako podstawę kostrukcji wykorzystałem pomysł Mistrza Yoshihito Isogawy, który zmodyfikowałem pod swoje potrzeby: przede wszystkim chciałem, aby pojazd jeździł w przeciwnym kierunku niż Mistrza Wall Tracker. Moje doświaczenie wskazuje, że Line Follower najsprawniej porusza się, gdy czujnik umieszczony jest na w miarę krótkim ramieniu, którego punkt zaczepienia przypada dokładnie w środku pomiędzy napędzajacymi robota kołami.
Chciałem także dodać koło Castora, gdyż to rozwiazanie poprawią płynność ruchu tych robotów.
Oczywiście chciałem ograniczyć się jedynie do klocków z zestawu LEGO WeDO 2.0.
Na koniec: program wcale nie jest trudny. Więcej – dość prosty ’;)
